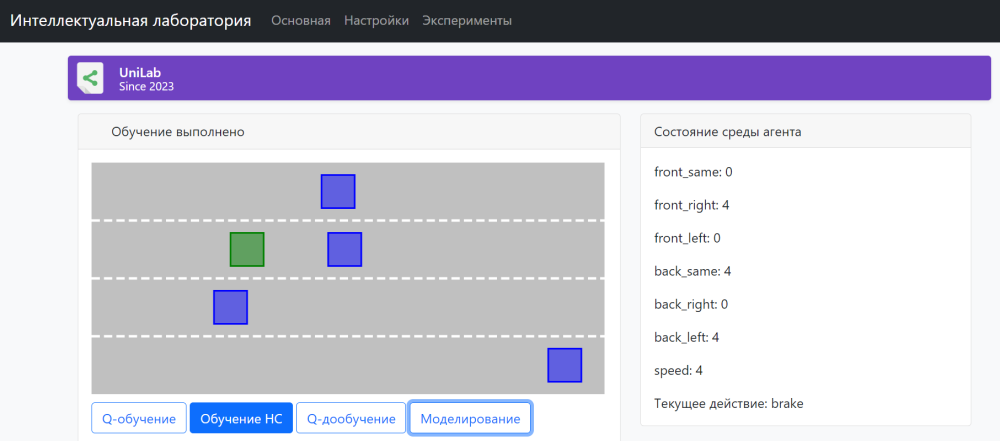
 Основной интерфейс программы
Основной интерфейс программы
Учёный из СПбГАСУ разработал интеллектуальную систему моделирования и оптимизации движения беспилотного транспортного средства на основе глубокого обучения с подкреплением.
Актуальность данного проекта связана с развитием технологий беспилотных транспортных средств (БТС), которые в настоящее время появляются на дорогах общего пользования. В связи с этим возникает необходимость в реализации таких систем управления БТС, которые учитывают не только ограничения правил безопасности дорожного движения, но и направлены на повышение эффективности энергетических затрат в процессе движения (например, сокращение затрат топлива или электроэнергии).
В рамках данной научно-исследовательской работы разработан новый подход к моделированию поведения БТС, который основывается на использовании моделей глубокого обучения с подкреплением.
Алексей Наместников, профессор кафедры информационных систем и технологий, занимается исследованиями в области применения интеллектуальных технологий при проектировании технических систем с 1997 г. По данной тематике им опубликовано более 100 научных работ.
В текущем году получено свидетельство о государственной регистрации программы для ЭВМ №2024667606 «Интеллектуальная программа для моделирования беспилотного транспортного средства».
Моделирование и реализация систем управления БТС является достаточно сложной задачей, поскольку приходится учитывать такие факторы, как отсутствие модели окружающей среды, её высокую степень динамичности, различные виды неопределённости в процессе взаимодействия БТС со средой. В рамках исследования рассматривались вопросы разработки модели поведения БТС как автономного интеллектуального агента в контексте глубокого обучения с подкреплением. В этом случае формальная модель поведения представляется в виде политики, которая параметризуется нейронной сетью. Экспериментальные исследования проводились в условиях, когда окружающая среда, в которой настраивается политика автономного агента, представляла собой модель дорожного движения с четырьмя полосами в одном направлении. Динамика задавалась скоростями движения модели БТС и моделями других транспортных средств.
В процессе исследования анализировались возможности для применения глубокого обучения с подкреплением к задаче моделирования поведения БТС, используя метод на основе глубокой полносвязной Q-сети.
Алексей Наместников планирует продолжить работу в направлении интеграции моделей глубокого обучения с подкреплением для обучения политике поведения БТС с моделями имитационного моделирования.
Описанные исследования были выполнены в рамках гранта на выполнение научно-исследовательских работ научно-педагогическими работниками СПбГАСУ в 2024 г.

