Егор Голов выступает с докладом по результатам исследования на 16-й Международной конференции «Организация и безопасность дорожного движения в крупных городах»
Егор Голов выступает с докладом по результатам исследования на 16-й Международной конференции «Организация и безопасность дорожного движения в крупных городах»
Егор Голов, доцент кафедры транспортных систем и дорожно-мостового строительства, в рамках своей научно-исследовательской работы «Создание динамической цифровой карты дорожно-транспортной инфраструктуры на базе агрегации высокоточных данных: построение сервисной платформы и протоколов взаимодействия» разработал принципиальные решения по созданию цифрового двойника дорожно-транспортной инфраструктуры для повышения безопасности дорожного движения, в том числе с участием высокоавтоматизированных транспортных средств (ВАТС).
«В современном мире, где городские транспортные системы становятся всё более сложными и динамичными, необходимость перехода к эффективным средствам цифрового проектирования становится очевидной. На протяжении долгого времени, несмотря на активное внедрение различных программных продуктов и электронных документов, процесс цифровизации ограничивался лишь копированием традиционного бумажного документооборота. Такой подход не способен обеспечить необходимую степень гибкости, оперативности и прозрачности при управлении городским транспортом», – отмечает он.
По словам исследователя, одним из важнейших этапов развития интеллектуальных транспортных систем является управление дорожным движением, основанное на создании динамических цифровых карт дорожно-транспортной инфраструктуры. Реализация данных проектов предназначена в первую очередь для повышения безопасности и эффективности транспортной сети российских городов и страны в целом.
С 2022 г. Егор Голов разрабатывает принципиальные решения по созданию цифрового двойника дорожно-транспортной инфраструктуры для повышения безопасности дорожного движения, в том числе с участием ВАТС. Результаты исследования докладывались на научных конгрессных мероприятиях, отражены в публикациях, получено свидетельство о государственной регистрации программы для ЭВМ «Система поддержки принятия решений для управления деятельностью по обеспечению БДД на основе анализа транспортно-эксплуатационного состояния автомобильных дорог».
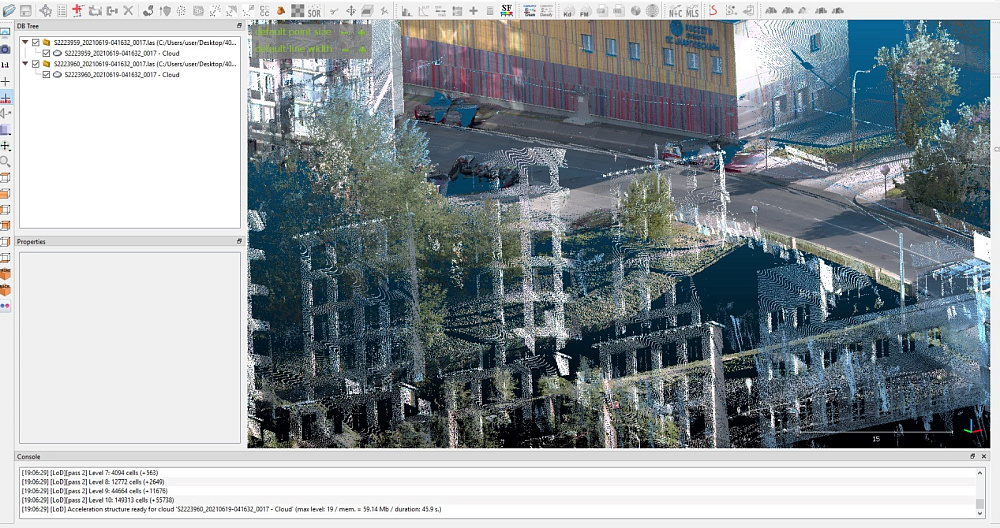
В рамках выполнения научно-исследовательской работы Егор Голов разработал структуру локальной динамической карты, а также сформировал её базу, позволяющую получать высокоточные координаты объектов дорожно-транспортной инфраструктуры. Наряду с этим разработаны принципиальные решения по описанию алгоритмов взаимодействия объектов дорожно-транспортной инфраструктуры и их цифровых двойников. Разработки проводились на кафедре транспортных систем и дорожно-мостового строительства СПбГАСУ с 2023 по 2024 г.
Руководитель и наставник Егора Голова – заведующий кафедрой транспортных систем и дорожно-мостового строительства Станислав Евтюков. Кроме того, исследователь опирается на труды профессора кафедры транспортных систем и дорожно-мостового строительства Александра Солодкого. Александр Иванович – один из основоположников внедрения концепции цифровых двойников в управление дорожной инфраструктурой. Уже много лет назад он понимал глубокую необходимость перехода от традиционных методов проектирования и управления к интеллектуальным системам. Его исследования в области информационных технологий и системного анализа заложили основу для развития методов создания и интеграции цифровых двойников в систему управления автомобильными дорогами.
«Цифровые решения в транспортном управлении – это не просто автоматизация, а комплексный подход к оптимизации всех процессов. Интеграция данных, моделирование и прогнозирование, управление в реальном времени – неотъемлемые элементы эффективного цифрового управления. Внедрение цифровых решений – инвестиция в будущее, которая позволит создать более устойчивую, инновационную и удобную городскую среду», – говорит автор разработки.
Данное исследование выполнено в рамках гранта на выполнение научно-исследовательских работ научно-педагогическими работниками СПбГАСУ в 2024 г.